Effects of Prior Knowledge for Stair Climbing of Bipedal Robots Based on Reinforcement Learning
October 18, 2024· ·
0 min read
·
0 min read
Mengya Su
Equal contribution
YasenJia
Equal contribution
,Yan Huang
Abstract
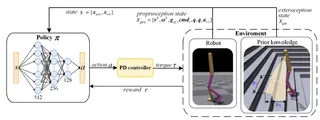
Bipedal robots with two legs are capable of traversing various terrains like level ground and staircases. Applying Reinforcement Learning (RL) based control can realize stable climbing stairs of bipedal robots. Prior knowledge of robots such as surrounding terrain information may improve the performance of climbing stairs. However, the impacts of prior knowledge on locomotion of bipedal robots across various terrains have not been systematically studied. In this work, we analyzed the effects of the amount of prior knowledge about terrain in front of the robot with RL-based control. Simulation results showed that introducing prior knowledge about terrain to bipedal robots can increase the maximum allowable ground height variation, realize smooth transition from level-ground walking to stair climbing, and improve disturbance rejection and energy efficiency. Prior knowledge is a trade-off between environmental information acquisition and computational complexity reduction. We find that there exists an optimal amount of prior knowledge for disturbance rejection and energy efficiency of stair climbing.
Type
Publication
In 2024 International Conference on Advanced Robotics and Mechatronics (ICARM)

Authors
YasenJia
(he/him)
Robotics Enthusiast
I am currently a graduate student of BIT(Beijing Institute of Technology, China), majoring in Intelligent Robot and System, supervised by Prof.Yan Huang. Before that, I received my bachelor’s degree in Mechatronical Engineering from BIT.